
股票代码
305363 关注我们
关注我们 
关注我们
-

-

全国贵宾服务热线
138-6446-2678
关注我们
关注我们
股票代码
305363
全国贵宾服务热线
138-6446-2678复合井盖专题
Recruit only 电缆沟盖板专题
电缆沟盖板专题 联系我们
联系我们
 184120
184120
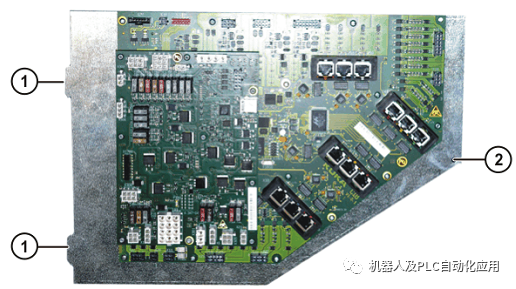
控制柜 (CCU)包含两块电路板 (CIB 控制柜接口板和 PMB 电源管理板),是机器人控制管理系统所有组件的配电装置和通讯接口。所有数据通过内部通讯传输给控制管理系统,并在那里继续处理。当电源断电时,控制管理系统部件接受蓄电池供电,直至位置数据备份完成以及控制管理系统关闭。通过负载测试检查蓄电池的充电状态和质量。
不要混淆插接位置。检查电缆、插头和插接位置标识。插头 X14 外部风扇和 X305 蓄电池的插头形状相同。如果混淆了这两个插头,则会损坏 CCU。会有着火危险。通过接口 X18 SmartPad 将加载附加电压。
更换CUU时,取下固定板上的螺栓,将固定板连同 CCU 从连接板开口处拉出。
检查新 CCU 是否有机械损伤。将固定板连同 CCU 插入连接板开口,然后拧紧。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。举报投诉

所有的动作都是按照以枪头为顶点来完成移动,XYZ方向切割枪方向不改变,如果
检查下列要点:检查是不是漏油,如发现严重漏油,应向修东西的人求助;检查齿轮游隙是否过大,如发现游隙过大,应向修东西的人求助;检查
库卡 00-105-414 KSD1-64 伺服驱动器 (E93DA143I
、同步带等连接件时,在任何情况下,作用在电动机上的力不能超过电动机容许的径向、轴向负载(
能识别我指定的瓶子,并把它从A位置移动到B位置,关键是怎么来识别呢,不是很清楚,求大神指点!在此感激不尽!
器)它应该有一个 ARM。(显然是用来装东西的)它应该有一个运动的驱动机制。(像自由度,运动和其他)它应该有一个末端执行器。(手指状
总体任务进度的中央处理器发出位置变化请求时开始的。导航系统通过制定行程计划或轨迹以开始执行位置变化请求。行程计划需考虑可用路径、已知障碍位置、
报警数据恢复维修:1、刹车检查正常运行前,需检查电机刹车每个轴的电机 刹车检查方法如下:(1)运行每个机械手的轴到它负载*大的位置。(2)
M2000 ABB DSQC545A 3HAB8101-19ABB IRC5 M2004
,并且可以方便地连接到不同的传感器和执行器上。NI提供了多种嵌入式硬件平台,以满足复杂系统的需求。从尖端的
定制:1.定制产品需要有图纸样品,或说明详细要求。2.设计的具体方案需要有工况说明,参数要求及相关配套说明。3.定制产品的时间由产品的复杂程度双方协定。
码垛实训平台能为解决在工作岗位所遇到的技术问题提供有建设性的解决方案。二、产品特点:1、输送单元(钢材骨架,表面喷塑处理,速度可调)2、码垛单元(由附属装置、工件承载台及夹具等组成)3、
单元(主要由PLC、触摸屏、开关电源、等组成)三、工作站运行环境参数:1、交流
在展会上可谓是吸睛神器,小伙伴们纷纷前来围观,这不,国际友人都不禁为我们昊威书法
按程序输入方式区分有编程输入型和示教输入型两类。编程输入型是将计算机上已编好的作业程序文件,通过RS232串口或者以太网等通信方式传送到
52rc51单片机还没到手。。。(只知道先从这方面先做)arduino---不过听网上说最近也很火的arduino 可以做
但我又有疑惑arduino 是能学到东西还是别人都做好了 自己拿来玩玩
,实现既定的末端轨迹,轨迹规划已完成,但是程序的延时不准确,导致最终轨迹混乱,求大神破?
(硬件及软件)组成。而焊接装备,以弧焊及点焊为例,则由焊接电源,(包括其
所示。当焊丝未接触工件待检测位置时,由焊接电源、继电器焊丝和工件构成的回路 A 处于断开状态,继电器并未得电,
研究是自动化领域最复杂。最具挑战性的课题,它集机械。电子。计算机。材料。传感器。
喷涂技术较为成熟,其研究工作早在20世纪60年代就慢慢的开始,目前的喷涂
席文姣,陈帝伊,马孝义(西北农林科技大学 水利与建筑工程学院,陕西 西安712100)0引言如何设计智能灭火
论、机构学、信息和传感技术、人工智能、仿生学等多学科而形成的高新技术,是当代研究十分活跃,应用日益广泛的领域。
来讲,末端的布局一般按照满足“三轴轴线交于一点”的根本原则来做,主要不同之处在于三个电机的布置和传动方式。
处于自动运行时,先要在手动状态时候选择需要运行的程序,然后通过钥匙开关切换
机械行业维修:西门子系统、法那克系统、沙迪克、FIDIA、天田、AMADA、友嘉、大宇系统;加工中心、..
……但这些都属于很前沿的领域,研究门槛高,实际的商业用途不是很广,所以大多还停留在样品阶段,走进市场的很少。
系统中一个重要的子系统,也慢慢变得受到人们的重视。它涉及了图像处理、模式识别和视觉
的6轴关节式操作机,它由驱动器、传动机构、机械手臂、关节以及内部传感器等组成。2、
,没有显示屏,所以没有GUI的问题。个子小(100mm*100mm*100mm以内),重量轻
的资料在网上还是挺难找的,早期刚进公司,想自己找点资料学习,发现网上资料好少,而且内容很简单,直到最近,领导决心培养我负责
的一条流水线,所以才把这些近乎“绝密资料”发给我学习。所以我自身也是初学者,希望把资料分享出来,大家能互相学习,互相交流进步
屏幕上操作即可,操作格外的简单。2.结构相对比较简单、零部件少。因此零部件的性能可靠、保养维修简单、故障率较低、所需库存零部件少。3.需定位抓起点和摆放点,示教方法简单易懂
器的SD卡故障;②主计算机模块内的通讯基板DSQC1006板发生故障;③主计
,能够胜任10KG的有效负载的自动化任务,工作半径可达1333mm,适用于大范围、大负载的作业任务,可应用于工厂自动化、汽车、3
,能够胜任10KG的有效负载的自动化任务,工作半径可达1333mm,适用于大范围、大负载的作业任务,可应用于工厂自动化、汽车、3
MGV电源模块维修PH1013-2840MGV电源维修 库卡电源模块维修
报:KSS13012{总线识别号}ECat Stack初始化时出错
报:KSS13012{总线识别号}ECat Stack初始化时出错可能的原因1.原因:在VorkVisual项目中RDC
 推荐资讯
推荐资讯 电缆沟盖板专题
电缆沟盖板专题 当前位置:
当前位置: 


